24小(xiǎo)时联系電(diàn)话:18217114652、13661815404
中文(wén)
路板设计")

- 您当前的位置:
- 首页>
- 電(diàn)子资讯>
- 技术专题>
- 机電(diàn)仿真软件和電(diàn)路设...
技术专题
机電(diàn)仿真软件和電(diàn)路设计分(fēn)析的作用(yòng)
机電(diàn)系统采用(yòng)多(duō)种软件来成功设计,包括机電(diàn)仿真软件。您的机電(diàn)仿真软件和机械建模工具可(kě)确保您的系统在机械方面达到预期的性能(néng),但是在创建机械仿真和机電(diàn)仿真之前,它们无法解决電(diàn)路的特定功能(néng)。
電(diàn)气设计和分(fēn)析工具对于设计電(diàn)动机控制電(diàn)路和功率传输系统非常重要,这样可(kě)以确保机械系统可(kě)以按预期运行。真正的机電(diàn)仿真软件将使用(yòng)系统的3D模型进行分(fēn)析,但这需要首先创建原理(lǐ)图和PCB布局。如果您可(kě)以在开始机械设计和机電(diàn)仿真之前完成電(diàn)路设计和PCB布局,则可(kě)以创建一个满足電(diàn)气和机械要求的系统。
机電(diàn)系统设计过程需要電(diàn)气设计师和机械设计师之间的紧密合作。机械设计师的工作可(kě)能(néng)很(hěn)困难,因為(wèi)他(tā)们必须考虑诸如外壳设计,外壳或包装的运动范围以及传递给系统中電(diàn)动机的功率之类的事情。机械设计的这些方面,尤其是传递给電(diàn)动机的功率和运动范围,只有(yǒu)在设计了功率和電(diàn)动机控制電(diàn)路之后才能(néng)适当考虑。
必须模拟的两个关键電(diàn)路是您的電(diàn)源传输/管理(lǐ)和電(diàn)机控制系统。这些電(diàn)路需要以最小(xiǎo)的损耗(即,尽可(kě)能(néng)高的效率)向机械组件提供所需的功率。这些系统都不是100%高效的,但是使用(yòng)正确的電(diàn)路设计和分(fēn)析工具可(kě)以使您尽可(kě)能(néng)地接近。
您的功率传输系统通常需要容纳来自未稳压直流電(diàn)源或交流電(diàn)源的输入功率。无论哪种情况,您都需要设计一个功率调节级,以便為(wèi)板上的下游電(diàn)动机供電(diàn)。由于電(diàn)动机有(yǒu)AC和DC两种,因此最好将電(diàn)动机类型与输入功率类型匹配。功率调节和传输策略需要与所使用(yòng)的電(diàn)源匹配。
对于将使用(yòng)交流電(diàn)源运行但需要直流電(diàn)动机或步进電(diàn)动机的更复杂的系统,您可(kě)能(néng)需要具有(yǒu)开关调节器的功率因数校正(PFC)電(diàn)路,以确保向机電(diàn)系统提供稳定的電(diàn)流和高效的功率传输系统。為(wèi)了从单相電(diàn)源转换為(wèi)脉动DC,可(kě)以使用(yòng)带有(yǒu)输出電(diàn)容器的标准整流器電(diàn)路。要将三相電(diàn)源转换為(wèi)直流電(diàn)源,请使用(yòng)以下電(diàn)路。
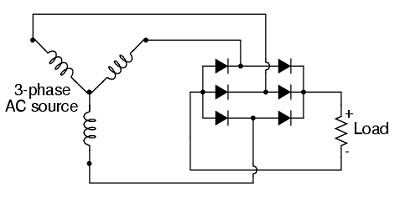
用(yòng)于AC-DC转换的三相整流電(diàn)路
在仿真软件中,您可(kě)以将三相交流输入電(diàn)源建模為(wèi)一组三个交流電(diàn)源,每个交流電(diàn)源的相位偏移為(wèi)120°。只需使用(yòng)二极管模型扫描源幅度,即可(kě)检查所产生纹波的幅度并计算功率因数。IEC 61000-3是三相交流電(diàn)源转换系统上非常严格的欧洲标准,该标准将输入電(diàn)流的总谐波失真(THD)限制在每相16至75 A RMS输入電(diàn)流时不超过48%。功率较低的设备(每相输入電(diàn)流最高為(wèi)16 A RMS)被限制為(wèi)不超过THD的33.8%。
系统的功率因数和总谐波失真(THD)相关,太高的总谐波失真(THD)过高会导致您的机電(diàn)系统在总谐波失真(THD)高时浪费功率。但是,直流電(diàn)源转换中需要总線(xiàn)電(diàn)容器来提供低通滤波和更稳定的输入直流電(diàn)源。
在仿真中,您需要尝试使用(yòng)不同的電(diàn)容器,以查看哪些值(包括其ESL和ESR值)将為(wèi)您的机電(diàn)组件提供最高的功率因数转换。这可(kě)以通过参数扫描来完成,同时扫描電(diàn)容器值并计算总输出功率效率。
電(diàn)机控制
术语“電(diàn)动机控制”涵盖正在运行的電(diàn)动机上的速度和转矩控制。这通过调节驱动信号中的参数之一来提供。对于实际的交流驱动電(diàn)路,交流電(diàn)动机的典型電(diàn)动机控制方法是使用(yòng)带双向可(kě)控硅和三端双向可(kě)控硅开关的電(diàn)位计来调节传递给電(diàn)动机的功率。
下面显示了一个单相電(diàn)源示例。在这种简单策略中,您可(kě)以将電(diàn)位计模拟為(wèi)固定電(diàn)阻,并在模拟扫频时将其值简单地更改為(wèi)参数,同时模拟传递给電(diàn)动机的功率(下面的M1)。
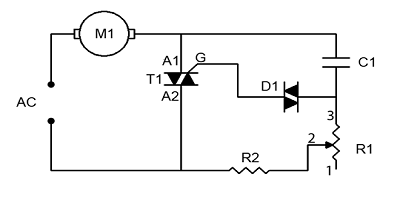
单相交流電(diàn)动机的速度控制電(diàn)路。三相電(diàn)动机可(kě)以构建类似的電(diàn)路
交流電(diàn)动机控制的最常用(yòng)方法是调整驱动信号的频率。在构建变频驱动電(diàn)路时,对于单相或三相输入功率,您需要根据電(diàn)源電(diàn)压/電(diàn)流模拟输出功率。对于直流控制,确切的方法取决于所用(yòng)電(diàn)动机的类型。下表总结了用(yòng)于控制直流電(diàn)动机速度以及转矩的不同方法。
|
直流電(diàn)动机类型 |
控制方式 |
|
无刷 |
更改施加到電(diàn)枢的電(diàn)压。这可(kě)能(néng)会使用(yòng)功率晶體(tǐ)管,它充当線(xiàn)性稳压器。 |
|
拉丝 |
与无刷電(diàn)机相同。 |
|
伺服(带反馈控制的有(yǒu)刷電(diàn)机) |
通常使用(yòng)PWM信号进行驱动,并使用(yòng)正反馈信号进行精确的速度选择。 |
|
踏步机 |
输出占空比与電(diàn)机上各点之间的间距匹配的PWM信号。 |
请注意,有(yǒu)刷和无刷電(diàn)机也可(kě)以使用(yòng)PWM信号,其中電(diàn)机接收的平均電(diàn)压等于占空比乘以線(xiàn)路電(diàn)压。这样,可(kě)以通过可(kě)编程的PWM发生器(例如在MCU中)以電(diàn)子方式控制電(diàn)动机。